自動運転向けミリ波レーダーの開発、シミュレータの革新で新たな段階へ:反射の挙動をより正確に再現
自動運転において、“ドライバーの目の代わり”となるセンシング技術。天候に左右されない安定した視認性が特長のミリ波レーダーの開発にはシミュレータが欠かせない。だが、ミリ波レーダーに特化したものが市場に存在しないというのが実情である。OTSLが開発した「AMMWRシミュレータ」は、レーダー専用マップと反射モデルを使うことで、レーダーの反射の仕方をより正確にリアルタイムでシミュレーションできる、ミリ波レーダー開発専用のシミュレータだ。
車載用ミリ波レーダーに特化したシミュレータは存在しない?
自動運転車の開発が加速している。自動車メーカーやティア1サプライヤーだけでなく、これまで自動車を開発したことのなかったハイテク企業までもが参入し、市場の勢いは増すばかりだ。
自動運転に求められる技術のうち、最も重要なものの1つが、カメラ、ミリ波レーダー、ライダー、超音波などのセンシング技術である。自動車を取り巻く環境を正確に把握し、制御を行うための情報を提供するという、いわば“ドライバーの目の代わり”となるからだ。これらの技術を向上することが、自動運転車の実用化に大きく貢献するのは間違いない。
幾つかあるセンシング技術の中で、ドイツなど欧州を中心に20年ほど前から開発されているのがミリ波レーダーだ。ミリ波レーダーを設計するには、実機を作り込む前に、レーダーの挙動を仮想的な環境で再現するシミュレータが欠かせない。
ところが、実は現時点で、「車載用ミリ波レーダー開発に特化した専用のシミュレータ」というのは存在しない。ミリ波レーダーを開発しているメーカーが使用している既存のシミュレータは、「ミリ波レーダーのシミュレータ」というよりは、「自動運転のシミュレータ」に近い。「センサーを自動運転車に組み込むと、自動運転車はどのような判断を行うのかをシミュレートする」のが目的なのである。そのため、ミリ波レーダーの周波数や対象物の反射係数などが固定のまま設定を変えられない、というシミュレータもある。
加えて、そうした既存のシミュレータには大きく2つの課題がある。まずは、建物や木などの対象物の反射率にRCS(レーダー反射断面積)を用いていることが挙げられる。RCSでは、「クルマ」「建物」などを「点」として捉え、その「点」にレーダーが当たった時の数値を反射データとする。だが、ミリ波レーダーの反射の仕方は、対象物の素材や形状によって大きく異なる。シミュレーションにRCSを使う限り、検知物体の形状に合わせたミリ波レーダーの反射を正確に再現するのは非常に難しい。
2つ目の課題が地図にカメラ画像を用いていることだ。ミリ波レーダーは、人間に見える可視光とは異なる波長でセンシングする。それ故、正確にシミュレーションするのであれば、ミリ波レーダーの波長に合わせた3DCGマップが必要になるからだ。
ミリ波レーダーに特化したシミュレータがないので、開発者は既存のシミュレータをやりくりしながら開発を進めているというのが現状である。だが、ミリ波レーダーの反射や挙動を正確にシミュレーションできない限り、ミリ波レーダーの性能を向上するのは困難だ。ミリ波レーダーの開発には、今までにないシミュレータが必要になるのである。
その解の1つが、組み込みシステムやリアルタイムシステムの開発を手掛けるOTSLが開発した「Advanced Millimeter Wave Radar Simulator(AMMWRシミュレータ)」だ。自動運転用ミリ波レーダーの開発に特化したシミュレータで、自動車メーカー、ティア1サプライヤーやミリ波レーダー用MMICメーカーが対象となる。周波数は、車載レーダーでよく使われる77GHz、79GHz、24GHzに設定することが可能だ。
反射モデルの使用で、正確な挙動を知る
AMMWRシミュレータの特長の1つとして、反射モデルの使用が挙げられる。
既存のシミュレータは、反射モデルを使っておらず、RCSを用いてシミュレーションしている。RCSは上述した通り、「クルマ」「建物」「木」などの物体を大幅に単純化して「点」とし、その点にレーダーが衝突した時の数値を反射データとしている。「点」ということは、大きさを持たない物体にレーダーを当て、その反射を見ているようなものである。
だが、ミリ波レーダーの反射の仕方は、同じ自動車でも、タイヤに当たった場合とフロントガラスに当たった場合の反射はまるで違うのだ。そのため、クルマを「点」として捉えているRCSをどれだけ利用しても、ミリ波レーダーが「クルマ」に当たった時の挙動は正確にシミュレーションできていないことになる。
一方で、AMMWRシミュレータは、レイトレース法電磁界で反射強度と受信電力を計算している。そのため、レイ(線)がある物体に衝突した時、その表面でどう反射するのかを反射モデルで実現している。この反射モデルは、OTSLが独自に作成したものだ。RCSではなく、反射モデルを使用することで、フロントパネルやタイヤ、バンパーなどにレーダーが当たった時にどのように反射するのかをシミュレートできるようになる。

さらに、RCSを使用したシミュレータは、レーダーの送信機と受信機が同じ位置にある、モノスタティックになっている。このため、送信機と受信機が物理的に離れている場合のシミュレーションができない。AMMWRシミュレータは、アンテナの位置を入力してシミュレーションできるので、その点がメリットになる。
ミリ波レーダー専用の地図を使う
もう1つの重要な特長は、カメラ画像を使った地図ではなく、レーダー専用の3D(3次元)CGマップを用いていることである。具体的には、Epic Gamesが開発したゲームエンジン「UE(Unreal Engine)4」に3DCGシナリオのソースコードを実装している。
AMMWRシミュレータの3DCGマップには、道路や街路樹、街灯、信号機、自動車など、地図上に表示される物体それぞれに、あらかじめ反射率が組み込まれている。レーダーが自動車、街灯、信号機に当たった場合、それぞれの反射率に応じて、正確な反射がミリ波レーダー照射モデルに返ってくることになる。反射率は周波数によって変わるが、この3DCGマップでは、周波数ごとに反射率を持たせている。
 AMMWRシミュレータの表示の一例。赤い自動車にレーダーが搭載されていて、黄色はレーダー視野である。3D画像の視点も自由に変えられる。右の図は、左で俯瞰していた赤い自動車を、ドライバー目線に切り替えたもの 出典:OTSL(クリックで拡大)
AMMWRシミュレータの表示の一例。赤い自動車にレーダーが搭載されていて、黄色はレーダー視野である。3D画像の視点も自由に変えられる。右の図は、左で俯瞰していた赤い自動車を、ドライバー目線に切り替えたもの 出典:OTSL(クリックで拡大)
OTSLは、3DCGマップの精度も向上した。もともとの3DCGマップは、基盤地図情報1mメッシュをベースに作られていた。通常はそれでも十分高密度だが、ミリ波レーダー向けには精度が足りない。例えば77GHzだと、波長はわずか4mm程になる。つまり、ミリメートルオーダーの精度が必要になるわけだ。AMMWRシミュレータの地図は、2mmの精度を実現している。
“真のリアルタイム性”を持つ
さらに、AMMWRシミュレータはレイトレース法を採用していることから、リアルタイムでシミュレーションを行える。
もちろん、既存のシミュレータも“リアルタイム”でシミュレーションをしている。ただ、ここでいう「リアルタイム」は、あくまでも「計算をリアルタイムにしている」という意味だ。対象物の反射特性など、シミュレーションに用いているデータは固定である。一方、AMMWRシミュレータは、レーダー専用マップと反射モデルを使っているので、レーダーが当たる物体や角度によって反射特性がリアルタイムに変わる。“真のリアルタイム性”を持っているといえるだろう。
仕様の異なるミリ波レーダーでもシミュレータができる
AMMWRシミュレータは、ミリ波レーダーの信号処理も行える。具体的には、まずミリ波レーダーモデルから照射したレーダーが物体に当たる。反射してアンテナに戻ってきた信号(受信信号)の電力を計算する。その受信信号の処理を、実際のハードウェア(回路ブロック)の信号処理が実装されており、実際の処理に近い方法で、ソフトウェアで行う。
このような信号処理を行える利点は、アンテナからMMICを含め後段の信号処理回路を自由に設定できることだ。つまり、ミリ波レーダーの照射強度や照射範囲、周波数といった特性を自由に設定可能だ。このため、仕様が異なるさまざまなメーカーのミリ波レーダーや、試作中のミリ波レーダーのシミュレーションが行えるようになる。
もう1つ利点がある。通常、ミリ波レーダーには、ポスト信号処理に方位探知アルゴリズムを各社各様で実装している。このアルゴリズムは、設計時はソフトウェアで検証を行うのみで、テストはハードウェアに実装してから行っているのが実情だ。AMMWRシミュレータはミリ波レーダーの信号処理が行えるので、仮想空間にアルゴリズムを実装し、検証できる。

AMMWRシミュレータを使うことで、ミリ波レーダーを設計するティア1サプライヤーは、自動車メーカーの仕様を事前に検討できるとともに、シミュレーションによって自社のレーダーの特性を見せることができるようになる。
ミリ波レーダー用MMICを設計、製造する半導体メーカーは、実環境に近い状態でのレーダー特性を設計段階で把握できる他、自社のデバイスを用いる優位性を確認できるだろう。
自動車メーカーにとってもメリットがある。これまでティア1などのサプライヤーとともに検討していたレーダーの取り付け位置やレイアウトを自分たちだけで事前に検討できるようになるからだ。「これまでは、自動車メーカーとサプライヤーが日程を合わせて一緒にテストするのが一般的だったが、その必要がなくなるので開発時間の削減につながる」(OTSL)
AMMWRシミュレータは、Windows 7/8/10 Professional 64ビットのOSに対応する。ただし、Windows 7では最大搭載メモリの容量が196GBに制限されるため、大規模なシミュレーションを行う場合はWindows 10(最大搭載メモリ:2TB)の使用を推奨している。
AMMWRシミュレータは、自動運転技術の開発向けに特化したシミュレータで構成されるOTSLのフレームワーク「COSMOsim」の1つである。COSMOsimを構成するその他のシミュレータには、ライダー、カメラ、赤外線、超音波用のシミュレータがあり、現在はライダー向けシミュレータ「ALRシミュレータ」が製品化されている。その他のシミュレータは現在、開発中だ。
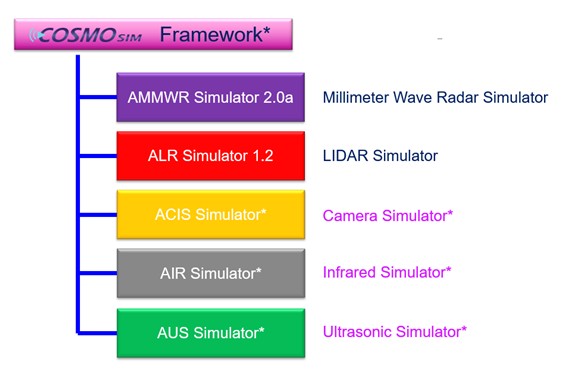 OTSLのシミュレータフレームワーク「COSMOsim」の構成。アスタリスク(*)の付いている3つのシミュレータは現在、開発中だ 出典:OTSL
OTSLのシミュレータフレームワーク「COSMOsim」の構成。アスタリスク(*)の付いている3つのシミュレータは現在、開発中だ 出典:OTSL自動運転向けにミリ波レーダーの重要性が増しているにもかかわらず、これまでは、ミリ波レーダーのシミュレーションに特化したシミュレータがなく、正確なシミュレーションができる環境が整っていなかった。AMMWRシミュレータは、ミリ波レーダーの挙動を正確に再現できる強力なツールとして、自動運転向けセンシング技術の開発をより一層後押しするだろう。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
提供:株式会社OTSL
アイティメディア営業企画/制作:EE Times Japan 編集部/掲載内容有効期限:2017年12月12日
関連リンク


![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。